实验一:机器人小车走直线
1、情景引入
控制机器人走直线,从A点到B点,根据机器人的速度和AB的距离,计算行走的时间。
2、使用材料清单
组装好的机器人小车
3、实验步骤:
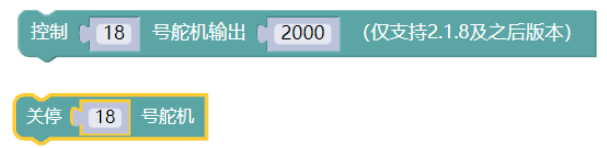
① 主要积木块
② 实现程序
树莓派端接收端程序:
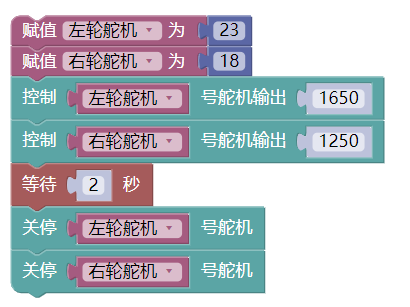
备注:360度舵机pwm范围在500-2500之间。以pwm=1500为转速最小(0),大于和小于1500分别为正转和反转,偏离1500越大转速越快。由于每个舵机的细微差异,不同舵机相同PWM值转速会有微小差异,需要通过不断调试,使得两个舵机转速达到一致。需要注意的是,由于镜像对称的原因,左右两个轮子分别为顺时针和逆时针旋转,才能直行,因此两个舵机的pwm值要在1500两侧。
4:课后拓展
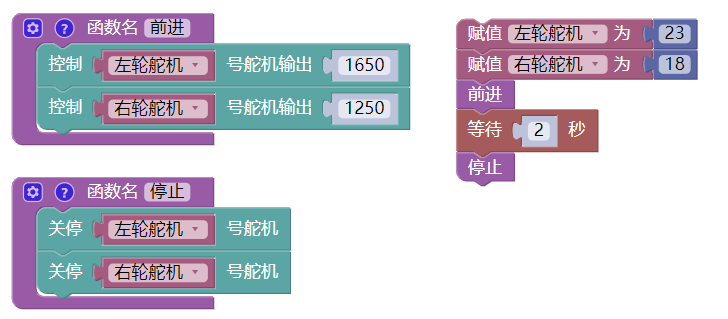
①如何将实现直行及停止的功能封装为函数,更方便重复使用?